Otomotiv sektörü, mekanik odaklı yapısını uzun zaman önce dijital kontrol sistemlerine emanet etti. Bugün bir aracın güvenliği, performansı ve kullanıcı konforu; onlarca Elektronik Kontrol Ünitesinin (ECU) saniyeler içinde hatasız bir şekilde veri paylaşmasına dayanıyor. Bu karmaşık trafiği yöneten ve sistem mimarisini ayakta tutan iki temel direk vardır: CAN ve LIN.
1. CAN Bus: Diferansiyel Güç ve Yüksek Güvenilirlik
CAN (Controller Area Network), 1980’lerde Bosch tarafından geliştirilen, “Multi-Master” mimariye sahip bir haberleşme protokolüdür. Aracın motor, şanzıman ve ABS gibi kritik sistemleri arasındaki ana veri yolunu oluşturur.
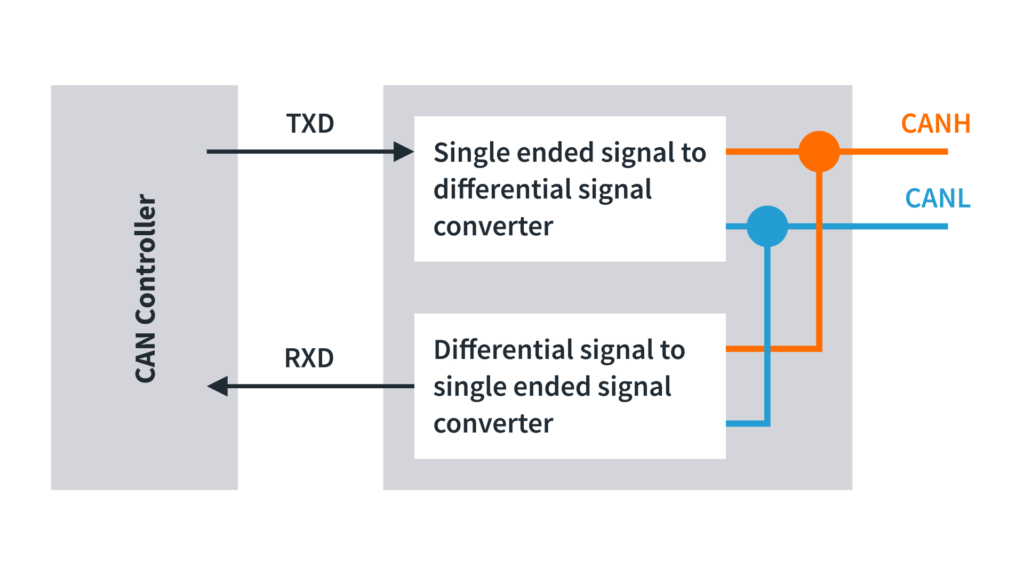
Fiziksel Katman ve Sinyalleşme
CAN’in gürültülü otomobil ortamında hayatta kalmasını sağlayan şey Diferansiyel Sinyalleşme yöntemidir. Sistem, CAN High ve CAN Low adlı iki hat arasındaki voltaj farkını okur.
- Dominant (Mantıksal 0): Hatlar arasında yaklaşık 2V fark oluşur.
- Recessive (Mantıksal 1): İki hat da 2.5V seviyesindedir, fark sıfıra yakındır. Bu yapı, dışarıdan gelen bir elektromanyetik gürültü her iki hattı da aynı anda etkilediği için verinin bozulmasını engeller. Hattın her iki ucundaki 120 Ohm terminasyon dirençleri ise sinyal yansımalarını sönümler.
Arbitrasyon ve Hata Yönetimi
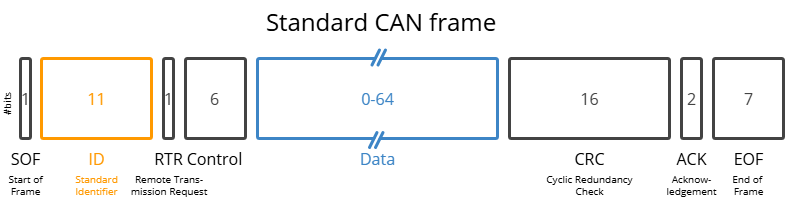
CAN protokolünde çakışmaları önlemek için CSMA/CA (Carrier Sense Multiple Access with Collision Avoidance) kullanılır. Mesajın başındaki Identifier (ID) ne kadar düşükse, mesaj o kadar önceliklidir. Ayrıca donanımsal CRC (Cyclic Redundancy Check) ve ACK mekanizmaları sayesinde hatalı mesajlar anında tespit edilir.
2. LIN Bus: Verimli ve Ekonomik Konfor
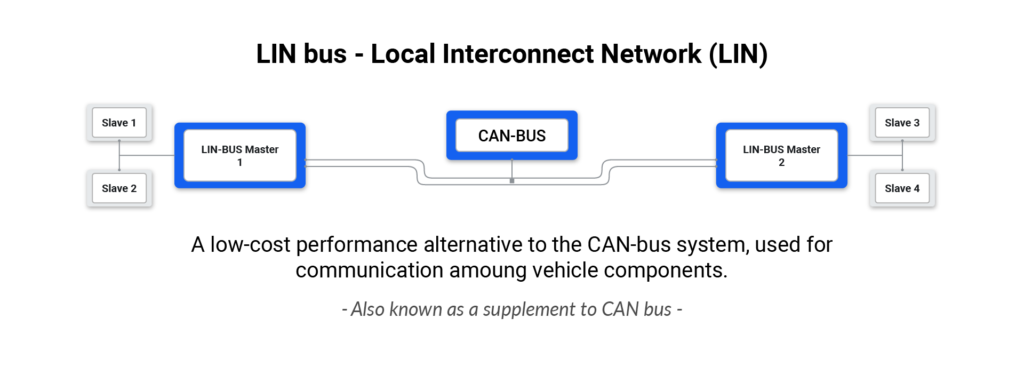
LIN (Local Interconnect Network), CAN’in yüksek maliyet gerektirmediği noktalarda (ayna kontrolü, silecekler, tavan aydınlatması) devreye giren, daha yalın bir protokoldür.
Fiziksel Katman: Single-Wire Üstünlüğü
LIN, maliyeti ve kablo ağırlığını minimize etmek için tek bir kablo üzerinden haberleşir.
- Sinyal Seviyesi: Genellikle aracın akü voltajı olan 12V (Recessive) ve 0V (Dominant) aralığında çalışır.
- Hız: Maksimum 20 kbps ile sınırlıdır. Bu hız, mekanik aksamların tetiklenmesi için fazlasıyla yeterlidir.
Master/Slave Hiyerarşisi
CAN’in aksine LIN tamamen deterministiktir. Bir Master düğüm, önceden tanımlanmış bir zaman tablosuna (Schedule Table) göre sorgu yayınlar ve ilgili Slave düğüm cevap verir. Bu yapı, veri çakışması ihtimalini tamamen ortadan kaldırır.
3. Mühendislik Gözüyle Karşılaştırma
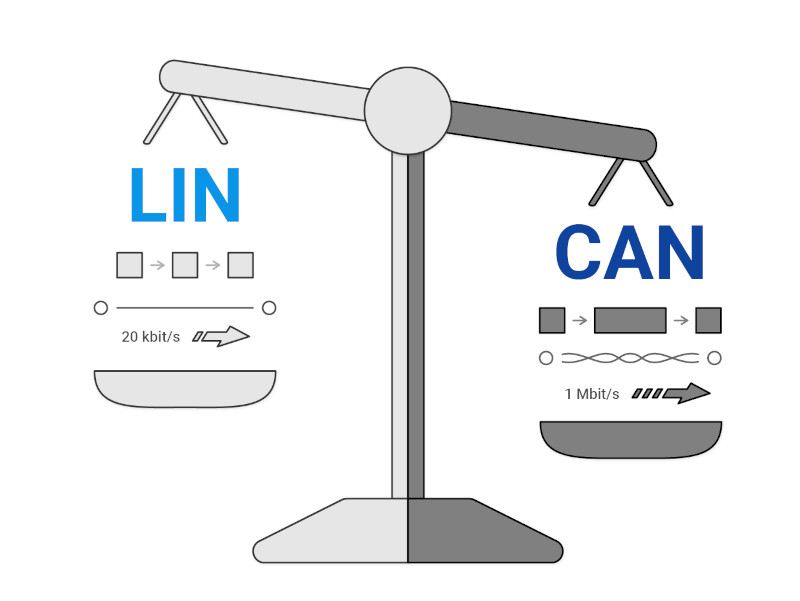
| Özellik | CAN Bus (Standard) | LIN Bus |
| Haberleşme | Diferansiyel (2-Wire) | Single-Wire (1-Wire) |
| Hız | 1 Mbps (CAN FD ile 5+ Mbps) | Maks. 20 kbps |
| Donanım | CAN Controller + Transceiver | UART/SCI + LIN Transceiver |
| Hata Kontrolü | 15-bit CRC (Gelişmiş) | 8-bit Checksum (Temel) |
| Topoloji | Multi-Master | Single Master / Multi-Slave |
Gelecek: Ethernet Nereye Evriliyor?
Bugün otonom sürüş sensörleri ve devasa multimedya ekranları, CAN’in 1 Mbps’lik sınırlarını çoktan zorlamaya başladı. İşte burada Otomotiv Etherneti devreye giriyor. 100 Mbps ile 1 Gbps arası hızlara ulaşan bu teknoloji, aracın ana omurgasını (backbone) oluşturmaya başladı.
Ancak Ethernet, CAN ve LIN’i tahtından indirmiyor; aksine bir hiyerarşi kuruyor. LIN basit düğmeleri, CAN kritik tepkileri, Ethernet ise yüksek çözünürlüklü veri akışını (kamera, radar, OTA güncellemeleri) yönetiyor.
Sonuç
Bir mühendis için CAN ve LIN seçimi, bir maliyet-performans optimizasyonudur. Kritik güvenlik sistemlerinde CAN’in dayanıklılığına, konfor donanımlarında ise LIN’in sadeliğine güveniyoruz. Yeni nesil araçlar, bu yerleşik protokollerin Ethernet ile kusursuz entegrasyonu üzerinde yükseliyor.
Bu içeriğe emojilerle tepki ver!